ケーススタディー
Axsisは高度な知能を備えたロボット設計の可能性を実証しています。ケンブリッジコンサルタンツは、既存のシステムよりも大幅に小型化しながらも飛躍的に機能性が増した手術用ロボットの作成を試みました。
Axsisは様々な手術で変革を起こし、手術における新しい分野でロボットを使用する機会を作り出しています。

小型化
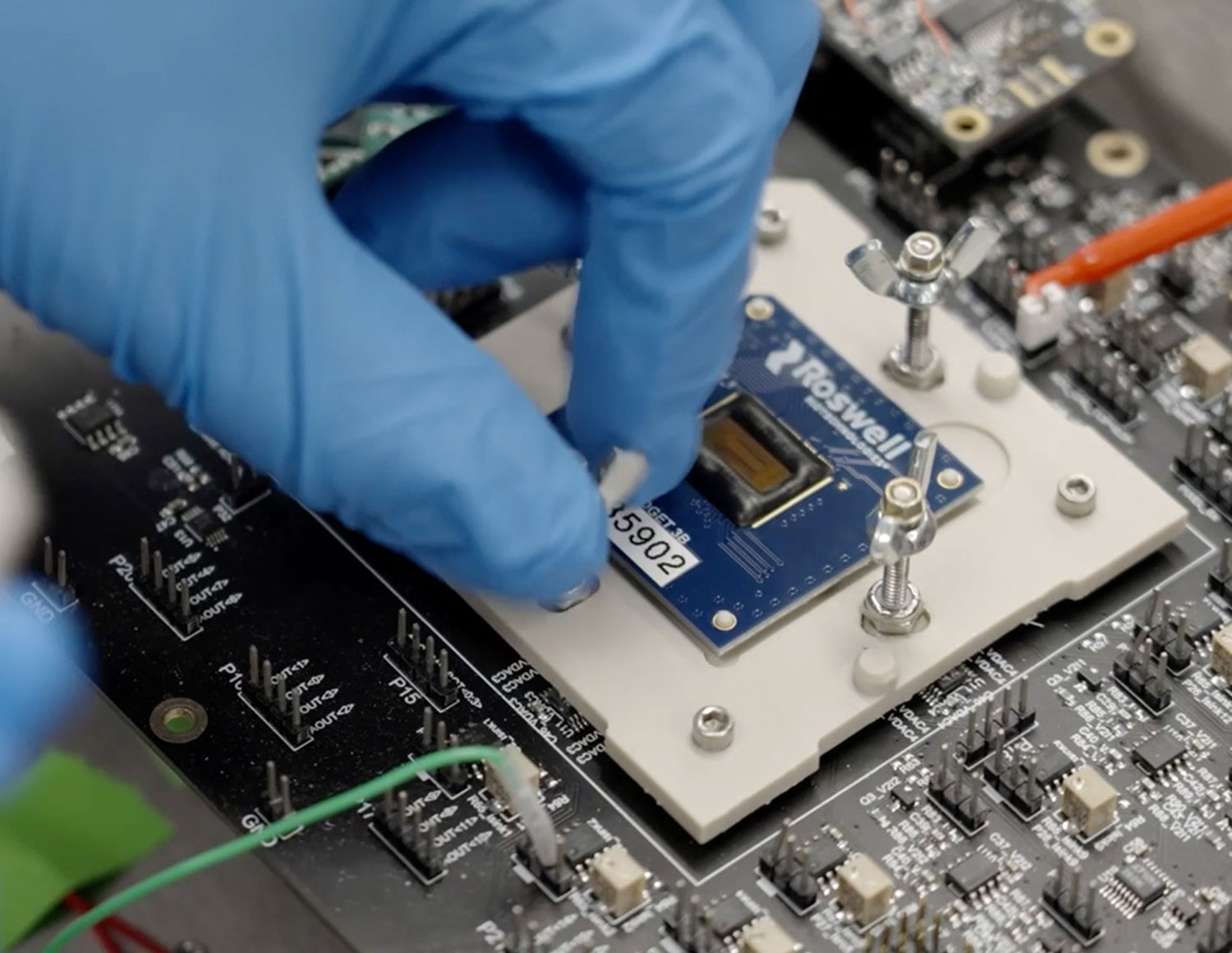
様々な用途に柔軟に対応可能なパーツ、画期的なモーターや制御設定により、システムを飲み物の缶程の小さなサイズにすることを可能にしました。

体内部の制御
1mmのワーキングチャネルを持つ1.8mmのアームを操作するAxsisは4自由度空間の動作が可能で、多方向の力を加える機能により軸方向や接線方向への移動や掴む動作を外部で大きな動作無しに可能としています。

手術スペースの効率化
スペースが限られた手術室内での利用を想定し設計されたAxsisは、各手術ごとに設置と取り外しが可能であるため、多くの患者に利用することができます。

反応性
湾曲部分の形は、外科医の手の動きを反映した滑らかで効率的な動きを可能にしました。力の加減を反映した遠隔操作により、外科医は実際に触れているかのような感覚を得ることができます。

画像ガイダンス
Axsisはリアルタイムの3D画像と統合され、新しいレベルのロボット支援手術を可能にします。バーチャルと現実の融合、手術の「マクロ」、また手術に関する情報提供と支援のための人工知能(AI)の一本化がすべて可能になります。
Axsisは、白内障手術の発展において大きな進歩であり、欧米諸国で最も頻繁に行われる手術を簡素化し自動化する可能性をもたらします。英国で毎年の様に行われる手術において、後嚢破損(水晶体嚢後方のふくろの破損)はかなり頻繁に起こる深刻な合併症であり、その頻度は担当医の経験に準じます。Axsisなどの「経験豊富な」ロボットは、合併症の発生率を減らし、年間数千人もの患者の回復に貢献することができるでしょう。
ケンブリッジコンサルタンツの参画

"軽量でコンパクトなロボットを開発するという本トライアルと同様の目標は、すでに数多くの人が試みました。しかし私たちは、臨床実践の深い基礎知識からスタートし、各プロセスの優先性や臨床目標を基本原則に、通常とは異なる設計アプローチにいち早くフォーカスしました。
従来のロボット設計に対するアプローチそのままを縮小し小型化するのではなく、適切な機能を併せ持ち、小型ながらもコアとなる設計を開発するというアプローチを選んだのです。開発の初期段階で原理実証を行うことで、このアプローチの正しさを証明しつつ、開発の初期段階で対処すべき重要な技術的課題を特定することができました。
コアコンセプトが確立され、最終システム開発を迅速に進めました。リスクベースかつシステムエンジニアリングを重視したアプローチにより、並行して複数チームが開発を進めることを可能でした。最初のシステム統合テストで想定通りに機能するという確信の基にスピーディーに進め、コンセプト創造からデモ作成までわずか五ヶ月間でした。"
課題

可能性の追求
白内障レンズの交換手術は、世界中で最も多く実施される外科手術であり、英国ではNHS(National Health Service/ 国民保健サービス)によって毎年300,000件 以上行われています。手術の成功率は高いものの、まれに手術前よりも視力が低下するケースがあります。
現在手術は顕微鏡を用いて手作業で行われています。小型化されたの手術支援ロボットを開発できれば、モーションスケールや低侵襲アクセスなどのロボットの利点が確立され、それにより手術の成功率が上がり、より多くの施設で手術を提供できることになります。

ロボットのサイズにおける課題
ケンブリッジコンサルタンツの手術ロボティクスチームは、眼科において現在のロボットを採用する際の課題を把握するため、外科医の方々に協力を頂きました。現在のロボットは大型機器として設計されており、大きく重いモーターによって作動する長くまっすぐな器具が患者の小さな開口部分を通過する仕組みです。つまり、これらのロボットは眼科用途にはまったく適してないと言えます。
私たちの設計は小型で安定性があり、軽いモーターやローリングジョイントを用い、新しい伝達システムを利用することにより、摩擦を最小限に抑えています。その結果、従来の手術支援ロボットとはまったく異なるスケールで動くロボットが作られたのです。

開発、そしてその先へ
Axsisを眼科手術のコンセプトデモとして開発した私たちは、今その先の可能性に目を向けています。
小型で関節機構を持つ手術ツールは、がんの早期治療や食道・胃腸管処置の自然開口手術、特定の神経刺激インプラントの配置など、他の多くの分野で大きなメリットをもたらす可能性があります。